Cảm biến hồng ngoại là gì? Cấu tạo của cảm biến hồng ngoại
Cảm biến hồng ngoại là gì? Cấu tạo của cảm biến hồng ngoại
Cảm biến hồng ngoại được ứng dụng rất nhiều hiện nay. Đặc biệt là trong công nghệ chụp ảnh nhiệt. Cảm biến sử dụng tia hồng ngoại phát ra vào nguồn nhiệt được đo. Tiếp đo nhận lại tia phản xạ và tính toán kết quả. Cảm biến hồng ngoại trong camera nhiệt hay máy ảnh nhiệt hồng ngoại sử dụng cách tính nhiệt độ thông qua quang phổ do tia hồng ngoại tính ra.
Cảm biến hồng ngoại được ứng dụng rất rộng, đặc biệt là chụp ảnh đêm, tìm kiếm người mất tích, hay cứu nạn trong đám cháy.
Cảm biến hồng ngoại Testo 875 có trong camera nhiệt hồng ngoại testo 875 là một cảm biến cao cấp. Với độ nhạy sáng cực mạnh, hỗ trợ độ phân giải rộng. Độ phân giải của máy ảnh nhiệt testo 875là 160 x 120 FPA
Cảm biến hồng ngoại là gì?

PIR về cơ bản được làm bằng một cảm biến pyroelectric (mà bạn có thể nhìn thấy dưới đây như là kim loại tròn có thể với một tinh thể hình chữ nhật ở trung tâm), có thể phát hiện mức độ bức xạ hồng ngoại. Tất cả mọi thứ phát ra một số bức xạ mức thấp, và một cái gì đó nóng hơn là, bức xạ nhiều hơn được phát ra. Các cảm biến trong một máy dò chuyển động thực sự được chia làm hai nửa. Lý do cho điều đó là chúng tôi đang tìm kiếm để phát hiện chuyển động (thay đổi) không phải mức IR trung bình. Hai nửa được nối dây để chúng loại bỏ lẫn nhau. Nếu một nửa nhìn thấy nhiều hơn hoặc ít hơn bức xạ hồng ngoại so với khác, đầu ra sẽ đu cao hoặc thấp.

Cùng với cảm biến pyroelectic là một loạt các mạch hỗ trợ, điện trở và tụ điện. Có vẻ như hầu hết các cảm biến hobbyist nhỏ sử dụng BISS0001 (“Micro Power PIR Motion Detector IC”) , chắc chắn là một chip rất rẻ tiền. Chip này có đầu ra của cảm biến và thực hiện một số xử lý nhỏ trên nó để phát ra xung đầu ra kỹ thuật số từ cảm biến analog.
Các PIR cũ hơn của chúng tôi trông như thế này:


Một số chỉ số cơ bản
Những số liệu thống kê này dành cho cảm biến PIR trong cửa hàng Adafruit rất giống với Parallax . Gần như tất cả các PIR sẽ có thông số kỹ thuật hơi khác nhau, mặc dù tất cả họ đều làm việc khá giống nhau. Nếu có một biểu dữ liệu, bạn sẽ muốn tham khảo nó
- Kích thước: Hình chữ nhật
- Giá: $ 10,00 tại cửa hàng Adafruit
- Đầu ra: Kỹ thuật số xung cao (3V) khi được kích hoạt (chuyển động phát hiện) kỹ thuật số thấp khi nhàn rỗi (không phát hiện chuyển động). Độ dài xung được xác định bởi điện trở và tụ điện trên PCB và khác với cảm biến với cảm biến.
- Phạm vi độ nhạy: lên tới 20 feet (6 mét) phạm vi phát hiện 110 ° x 70 °
- Nguồn cung cấp: 5V-12V điện áp đầu vào cho hầu hết các mô-đun (họ có một điều 3.3V), nhưng 5V là lý tưởng trong trường hợp điều chỉnh có thông số kỹ thuật khác nhau
- BIS0001 Datasheet (chip giải mã được sử dụng)
- Bảng dữ liệu RE200B (rất có thể là yếu tố cảm biến PIR được sử dụng)
- Bảng dữ liệu NL11NH (sử dụng ống kính tương đương)
- Parallax Datasheet trên phiên bản của bộ cảm biến
Thêm liên kết!
- Trang tuyệt vời trên cảm biến PIR từ GLOLAB \\
Cách thức hoạt động của PIR
Cảm biến PIR phức tạp hơn nhiều cảm biến khác được giải thích trong các hướng dẫn này (như photocells, FSR và công tắc nghiêng) vì có nhiều biến ảnh hưởng đến đầu vào và đầu ra của cảm biến. Để bắt đầu giải thích cách một cảm biến cơ bản hoạt động, chúng tôi sẽ sử dụng sơ đồ khá tốt đẹp này
Các cảm biến PIR chính nó có hai khe cắm trong nó, mỗi khe được làm bằng một vật liệu đặc biệt nhạy cảm với IR. Ống kính được sử dụng ở đây không thực sự làm nhiều và vì vậy chúng tôi thấy rằng hai khe có thể ‘nhìn thấy’ qua một khoảng cách nào đó (về cơ bản là độ nhạy của cảm biến). Khi cảm biến không hoạt động, cả hai khe đều phát hiện cùng một lượng IR, lượng môi trường xung quanh phát ra từ phòng hoặc tường hoặc ngoài trời. Khi một cơ thể ấm áp như một con người hoặc động vật đi qua, nó đầu tiên chặn một nửa của cảm biến PIR, gây ra một sự thay đổi khác biệt tích cực giữa hai nửa. Khi cơ thể ấm áp rời khỏi khu vực cảm biến, ngược lại xảy ra, theo đó cảm biến tạo ra một sự thay đổi khác biệt âm. Những xung thay đổi này là những gì được phát hiện.

Cảm biến PIR
Các cảm biến IR chính nó được đặt trong một kim loại kín kín có thể để cải thiện khả năng miễn dịch tiếng ồn / nhiệt độ / độ ẩm. Có một cửa sổ được làm bằng vật liệu truyền qua IR (thường được phủ silicon vì nó rất dễ đi) để bảo vệ yếu tố cảm biến. Phía sau cửa sổ là hai cảm biến cân bằng.

Hình ảnh trái từ bảng dữ liệu Murata

Hình ảnh từ biểu dữ liệu RE200B
Bạn có thể thấy trên biểu đồ hiển thị cửa sổ phần tử, hai phần của vật liệu cảm biến

Hình ảnh từ biểu dữ liệu RE200B
Hình ảnh này cho thấy sơ đồ bên trong. Thực tế là có một JFET bên trong (một loại bóng bán dẫn) có độ nhiễu rất thấp và bộ đệm trở kháng cực cao của các cảm biến vào một thứ mà một chip chi phí thấp (như BIS0001) có thể cảm nhận được.
Ống kính
Cảm biến PIR khá chung chung và phần lớn chỉ thay đổi về giá và độ nhạy. Hầu hết các phép thuật thực sự xảy ra với quang học. Đây là một ý tưởng khá tốt cho sản xuất: cảm biến PIR và mạch được cố định và chi phí một vài đô la. Ống kính chỉ tốn vài xu và có thể thay đổi bề rộng, phạm vi, mẫu cảm biến, rất dễ dàng.Trong sơ đồ lên trên, ống kính chỉ là một miếng nhựa, nhưng điều đó có nghĩa là khu vực phát hiện chỉ là hai hình chữ nhật. Thông thường chúng tôi muốn có một khu vực phát hiện lớn hơn nhiều. Để thực hiện điều đó, chúng tôi sử dụng một ống kính đơn giản như ống kính được tìm thấy trong máy ảnh: chúng bao phủ một khu vực rộng lớn (chẳng hạn như cảnh quan) thành một ống kính nhỏ (trên phim hoặc cảm biến CCD). Vì những lý do sẽ sớm xuất hiện, chúng tôi muốn làm cho các ống kính PIR nhỏ và mỏng và có thể được đúc từ nhựa rẻ tiền, mặc dù nó có thể làm biến dạng. Vì lý do này, các cảm biến thực ra là ống kính Fresnel :

Hình ảnh từ tạp chí Sensors
Ống kính Fresnel ngưng tụ ánh sáng, cung cấp dải IR lớn hơn cho cảm biến.

Hình ảnh từ BHlens.com
Hình ảnh từ Cypress appnote 2105
OK, vì vậy bây giờ chúng tôi có một phạm vi lớn hơn nhiều. Tuy nhiên, hãy nhớ rằng chúng ta thực sự có hai cảm biến, và quan trọng hơn là chúng ta không muốn hai hình chữ nhật diện tích cảm biến thực sự lớn, mà là một tán xạ của nhiều vùng nhỏ. Vì vậy, những gì chúng tôi làm là chia ống kính thành nhiều phần, mỗi phần trong số đó là một ống kính fresnel.

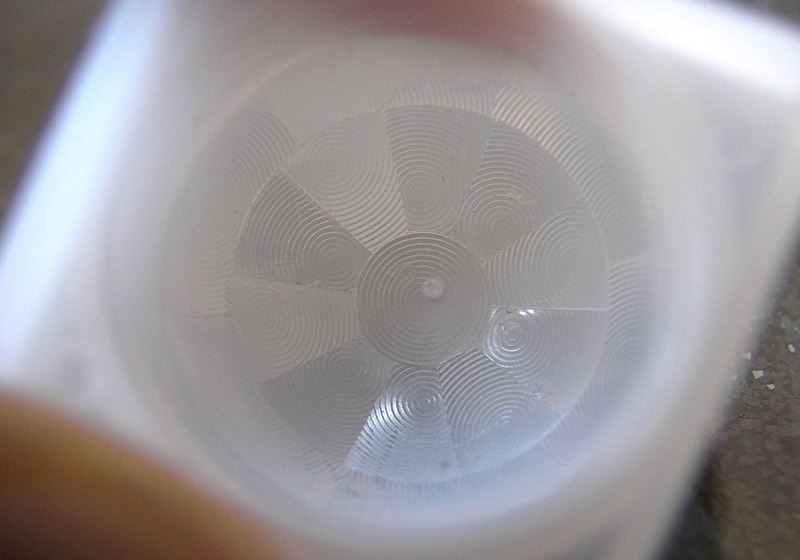
Ảnh macro này cho thấy các ống kính Fresnel khác nhau trong mỗi khía cạnh!
Các khía cạnh khác nhau và ống kính phụ tạo ra một loạt các khu vực phát hiện, xen kẽ với nhau. Đó là lý do tại sao ống kính trung tâm trong các khía cạnh trên là ‘không nhất quán’ – mỗi điểm khác chỉ tới một nửa khác nhau của phần tử cảm biến PIR


Hình ảnh từ bảng dữ liệu NL11NH
Đây là một hình ảnh khác, chất lượng hơn nhưng không định lượng. (Lưu ý rằng cảm biến trong cửa hàng Adafruit là 110 ° không phải 90 °)

Hình ảnh từ IR-TEC
Kết nối với một PIR

Hầu hết các mô-đun PIR có kết nối 3 chân ở bên hoặc phía dưới. Pinout có thể khác nhau giữa các mô-đun để kiểm tra gấp ba lần pinout! Nó thường được in lụa ngay bên cạnh kết nối (ít nhất là của chúng ta!) Một chốt sẽ được nối đất, một pin khác sẽ là tín hiệu và cái cuối cùng sẽ là sức mạnh. Công suất thường là đầu vào 3-5VDC nhưng có thể cao tới 12V. Đôi khi các mô-đun lớn hơn không có đầu ra trực tiếp và thay vào đó chỉ hoạt động một rơle trong trường hợp có mặt đất, nguồn và hai kết nối chuyển đổi.
Đầu ra của một số rơle có thể là ‘bộ thu mở’ – điều đó có nghĩa là nó đòi hỏi một điện trở pullup. Nếu bạn không nhận được một đầu ra biến, hãy chắc chắn thử gắn một pullup 10K giữa tín hiệu và chân nguồn.
Một cách dễ dàng để tạo mẫu với cảm biến PIR là kết nối nó với breadboard kể từ khi cổng kết nối là 0,1 “khoảng cách. Một số PIR đi kèm với tiêu đề trên chúng, một người từ adafruit có tiêu đề 3 chân thẳng trên chúng để kết nối cáp

Kiểm tra một PIR


Bây giờ khi PIR phát hiện chuyển động, đầu ra pin sẽ đi “cao” đến 3.3V và sáng lên đèn LED!
Một khi bạn có breadboard có dây lên, chèn pin và chờ 30-60 giây cho PIR để ‘ổn định’. Trong thời gian đó đèn LED có thể nhấp nháy một chút. Chờ cho đến khi đèn LED tắt và sau đó di chuyển xung quanh phía trước nó, vẫy tay, vv, để xem đèn LED sáng lên!
Khởi động lại
Có một vài lựa chọn bạn có thể có với PIR của bạn. Đầu tiên chúng ta sẽ khám phá tùy chọn ‘Retriggering’.
Một khi bạn có đèn LED nhấp nháy, nhìn vào mặt sau của cảm biến PIR và đảm bảo rằng jumper được đặt ở vị trí L như hình dưới đây.




(Các đồ thị ở trên là từ biểu dữ liệu BISS0001, chúng hơi hút)
Đối với hầu hết các ứng dụng, chế độ “truyền lại” (jumper ở H như được hiển thị bên dưới) sẽ đẹp hơn một chút.

Thay đổi độ nhạy
Quả cầu Adafruit PIR có một cái trimpot ở phía sau để điều chỉnh độ nhạy. Bạn có thể điều chỉnh điều này nếu PIR của bạn quá nhạy cảm hoặc không đủ nhạy cảm – theo chiều kim đồng hồ làm cho nó nhạy cảm hơn.
Thay đổi thời gian xung và thời gian chờ
Có hai ‘thời gian chờ’ kết hợp với cảm biến PIR. Một là thời gian chờ ” Tx “: thời gian đèn LED sáng lên sau khi phát hiện chuyển động – điều này rất dễ điều chỉnh trên thiết bị thu thập thông tin của Adafruit PIR vì có một chiết áp.
Thứ hai là thời gian chờ ” Ti ” là thời gian đèn LED được đảm bảo tắt khi không có chuyển động. Điều này là không dễ dàng thay đổi nhưng nếu bạn đang tiện dụng với một sắt hàn nó là trong vòng lý do.Đầu tiên, hãy xem lại biểu dữ liệu BISS một lần nữa

Trên cảm biến PIR của Adafruit, có một chiết áp nhỏ được dán nhãn TIME. Đây là một điện trở điều chỉnh 1 Megaohm được thêm vào một điện trở dòng 10K. Và C6 là 0.01uF
Tx = 24576 x (10K + Rtime) x 0,01uF
Nếu chiết áp Rtime được xoay hết chiều ngược chiều kim đồng hồ (đến 0 ohms) thì
Tx = 24576 x (10K) x 0,01uF = 2,5 giây (xấp xỉ)
Nếu chiết áp Rtime được xoay hết chiều kim đồng hồ thành 1 Megaohm thì
Tx = 24576 x (1010K) x 0,01uF = 250 giây (xấp xỉ)
Nếu RTime ở giữa, đó là khoảng 120 giây (hai phút) để bạn có thể tinh chỉnh nó khi cần thiết. Ví dụ nếu bạn muốn chuyển động từ một người nào đó để bật một fan hâm mộ cho tối thiểu là 1 phút, thiết lập các chiết áp Rtime khoảng 1/4 khoảng cách.
Đối với các cảm biến PIR cũ / khác
Nếu bạn có một cảm biến PIR từ một nơi khác mà không có một điều chỉnh chiết áp, bạn có thể theo dõi ra các điện trở điều chỉnh theo cách này:
Việc xác định R10 và R9 không quá khó khăn. Thật không may cảm biến PIR này bị ghi nhãn sai (có vẻ như họ đổi R9 R17). Bạn có thể theo dõi các chân bằng cách nhìn vào bảng dữ liệu BISS001 và tìm ra các chân chúng là gì – R10 kết nối với chốt 3 và R9 kết nối với pin 7. các tụ điện có một chút khó khăn hơn để xác định, nhưng bạn có thể ‘đảo ngược kỹ sư’ chúng từ thời gian cảm biến và giải quyết!
Ví dụ:
Tx là = 24576 * R10 * C6 = ~ 1,2 giây
R10 = 4,7K và C6 = 10nF
Tương tự như vậy,
Ti = 24 * R9 * C7 = ~ 1,2 giây
R9 = 470K và C7 = 0,1uF
Bạn có thể thay đổi thời gian bằng cách hoán đổi các điện trở hoặc tụ điện khác nhau. Để có một hướng dẫn tốt đẹp về điều này, hãy xem trang hack của Keith .
Sử dụng PIR w / Arduino
Đọc cảm biến PIR
Kết nối cảm biến PIR với một vi điều khiển thực sự đơn giản. Các PIR hoạt động như một đầu ra kỹ thuật số, nó có thể là điện áp cao hoặc điện áp thấp, vì vậy tất cả những gì bạn cần làm là lắng nghe các pin để lật cao (phát hiện) hoặc thấp (không phát hiện) bằng cách lắng nghe trên một đầu vào kỹ thuật số trên Arduino của bạn
Có khả năng bạn sẽ muốn kích hoạt lại, vì vậy hãy chắc chắn để đặt jumper ở vị trí H !
Cấp nguồn cho PIR với 5V và nối đất với đất. Sau đó kết nối đầu ra với một chân kỹ thuật số. Trong ví dụ này, chúng tôi sẽ sử dụng pin 2.
Tải tập tin
- / *
- * Bộ cảm biến PIR
- * /
- int ledPin = 13 ; // chọn ghim cho đèn LED
- int inputPin = 2 ; // chọn chốt đầu vào (cho cảm biến PIR)
- int pirState = LOW ; // chúng ta bắt đầu, giả sử không phát hiện chuyển động
- int val = 0 ; // biến để đọc trạng thái pin
- void setup () {
- pinMode ( ledPin , OUTPUT ); // tuyên bố LED là đầu ra
- pinMode ( inputPin , INPUT ); // khai báo cảm biến làm đầu vào
- Nối tiếp . bắt đầu ( 9600 );
- }
- void loop () {
- val = digitalRead ( inputPin ); // đọc giá trị đầu vào
- if ( val == HIGH ) { // kiểm tra xem đầu vào có CAO không
- digitalWrite ( ledPin , HIGH ); // bật đèn LED
- if ( pirState == LOW ) {
- // chúng tôi vừa mới bật
- Nối tiếp . println ( “Phát hiện chuyển động!” );
- // Chúng tôi chỉ muốn in trên thay đổi đầu ra, không phải trạng thái
- pirState = HIGH ;
- }
- } else {
- digitalWrite ( ledPin , LOW ); // tắt đèn LED
- if ( pirState == HIGH ) {
- // chúng ta vừa mới quay
- Nối tiếp . println ( “Motion ended!” );
- // Chúng tôi chỉ muốn in trên thay đổi đầu ra, không phải trạng thái
- pirState = LOW ;
- }
- }
- }
Mã vi mạch
Thật dễ dàng để sử dụng một cảm biến PIR với CircuitPython sử dụng đầu vào kỹ thuật số đơn giản. Cảm biến PIR trông và hoạt động giống như nút hoặc nút chuyển, tức là nó chỉ là mức logic cao hay thấp, vì vậy bạn không cần bất kỳ thư viện đặc biệt nào hoặc mã khác để đọc một từ Python. Nó sẽ giúp bạn làm quen với đầu vào và đầu ra kỹ thuật số của CircuitPython trước khi tiếp tục!
Trước tiên hãy đảm bảo rằng cảm biến PIR của bạn được kết nối với bo mạch của bạn như được hiển thị ở trang trước. Không có sự khác biệt dây một cảm biến PIR đến một bảng Arduino vs CircuitPython. Bạn phải kết nối đầu ra nguồn, mặt đất và cảm biến với bo mạch của bạn. Đầu ra cảm biến phải được kết nối với bất kỳ dòng I / O kỹ thuật số nào trên bo mạch của bạn. Trong ví dụ này, chúng ta sẽ sử dụng pin D2 trên một Trinket M0.